
Dr. Stefan HINTERSTOISSER
stefan.hinterstoisser at gmail dot com
I'm an expert in ML (Deep Learning), Computer Vision and Software Engineering. I'm currently working as a Team Lead / Manager (TLM) for X (formerly known as Google [X]) on Robotic Perception.
Current and Former Collaborators
Vincent Lepetit (Universite Bordeaux) - Selim Benhimane (Apple) - Pascal Fua (CVLab) - Slobodan Ilic (Siemens) - Kurt Konolige (X) - Gary Bradski (Arraiy) - Ethan Rublee (Arraiy) - Troy Straszheim (KIT) - Hauke Strasdat (Oculus) - Nassir Navab (TU Munich) - Peter Sturm (Inria) - Paul Wohlhart (X) - Pierre Georgel (Google) - Stefan Holzer (Fyusion) - Nicolas Alt (RoVi) - Naresh Rajkumar (Google) - Kuan Fang (Stanford) - Cedric Cagniart (Google) - Byung-Kuk Seo (ETRI) - Yungfei Bai (X) - Mrinal Kalakrishnan (X) - Kyle Lutz (X) - Matt Calabrese (Google) - Eric Niebler (Facebook) - Konstantinos Bousmalis (Google Brain)
Research / Publications

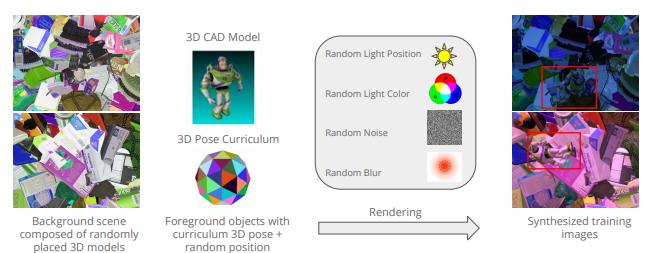
Synthetic Image Generation for Deep Learning
-
ICCVW'19 paper on generating purely synthetic data for deep learning.
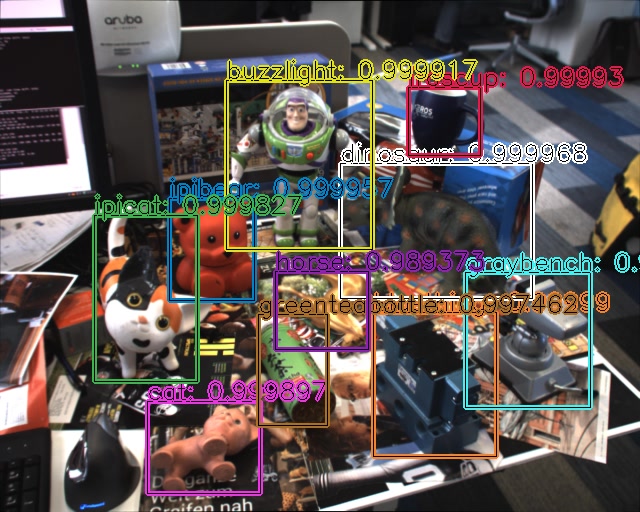
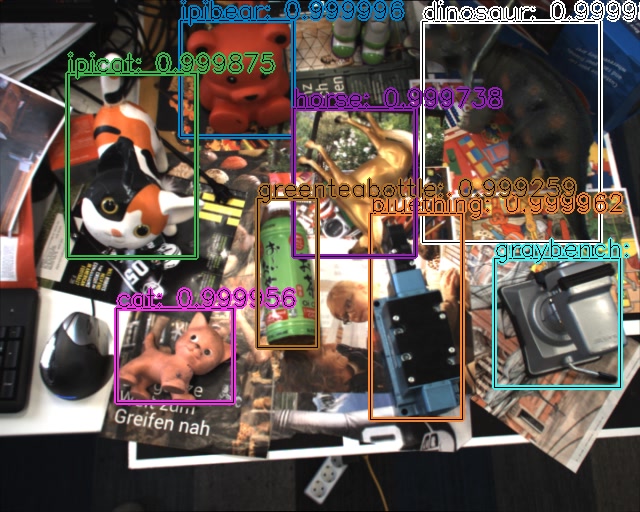
Transfer Learning for Object Detection
-
ECCVW'18 paper on transfer learning for object detection from synthetic data generated with CAD models.

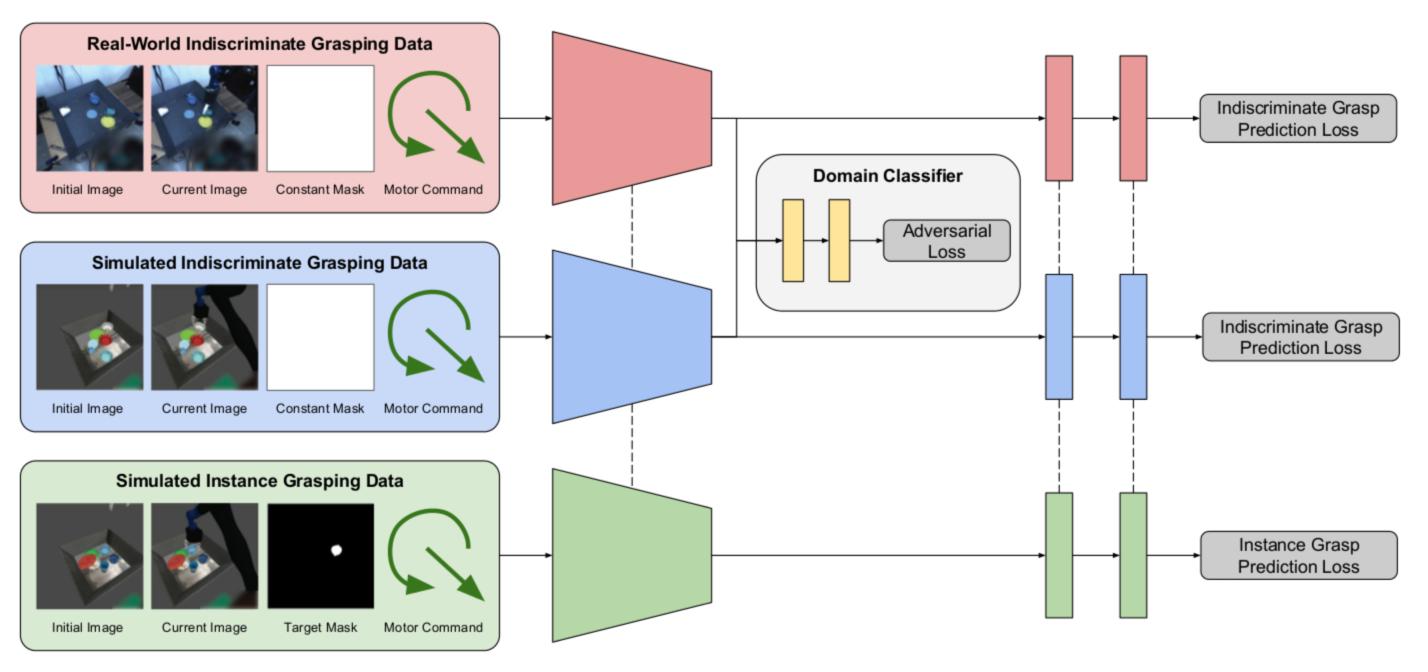
Domain Adaptation for Deep Learning
-
ICRA'18 paper on multitask domain adaptation for deep learning of instance grasping from simulation.
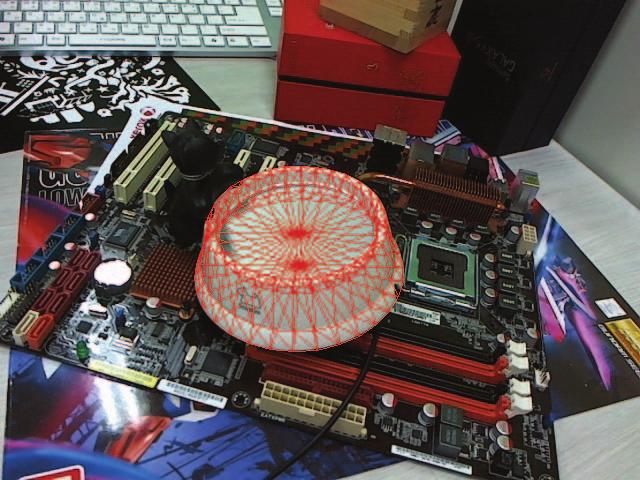
Efficient Point Pair Features
-
ECCV'16 paper on efficient point pair features for detecting and estimating the 3D pose of CAD models.

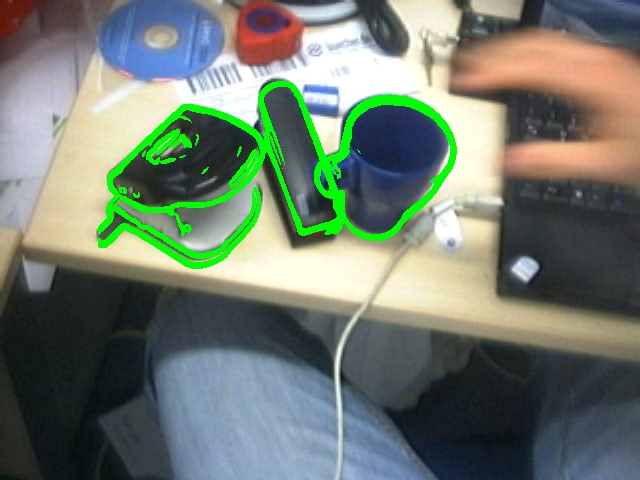
Tracking Texture-less Objects
-
TVCG'13 paper on optimal local Searching for fast and robust textureless 3D object tracking in highly cluttered backgrounds.


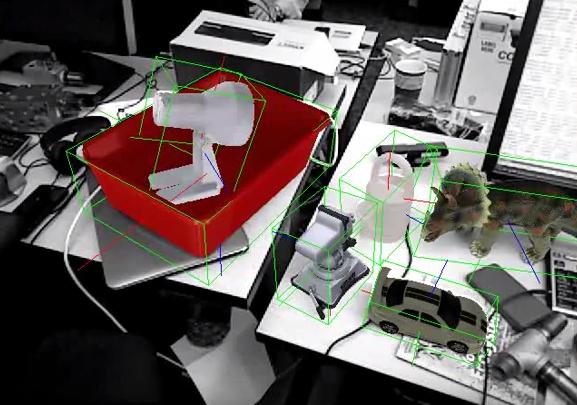
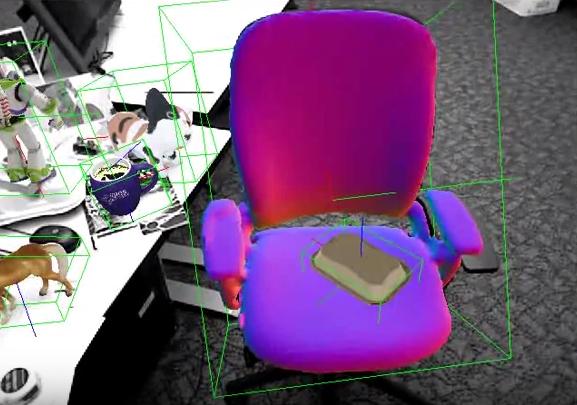
Object Detection and 6D Pose Estimation
-
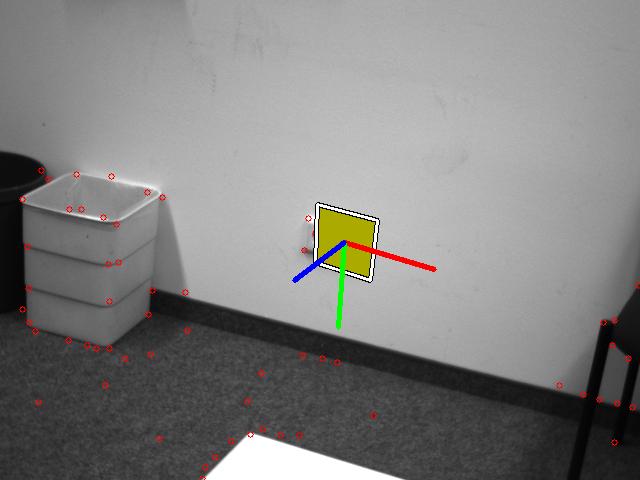
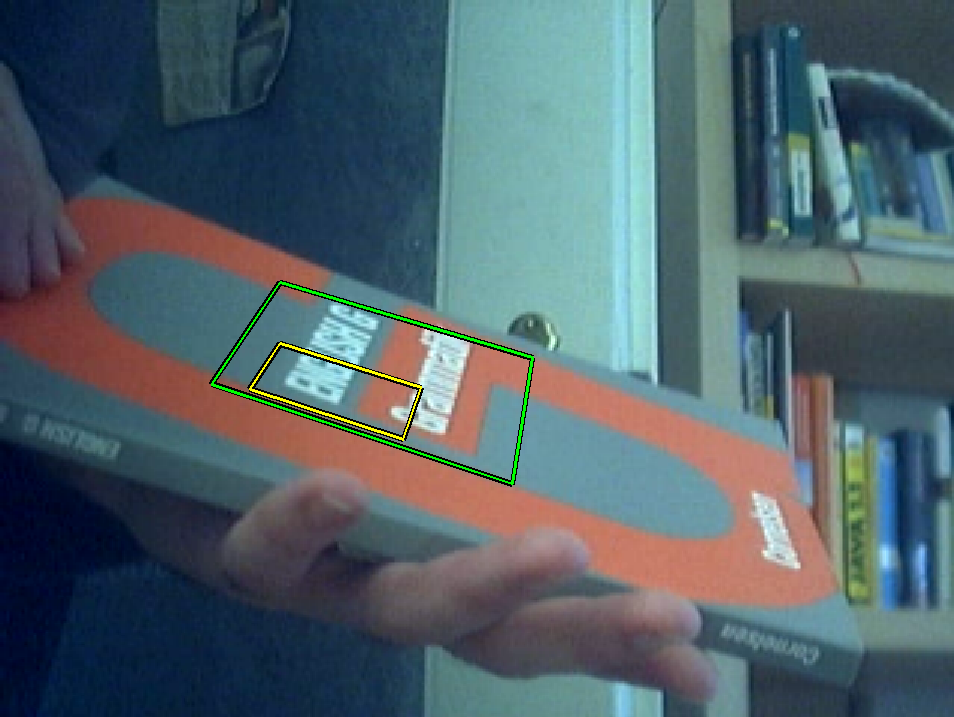
ACCV'12 paper on efficient template matching for detecting and estimating the 3D pose of CAD models.
The LINEMOD dataset can be found here.
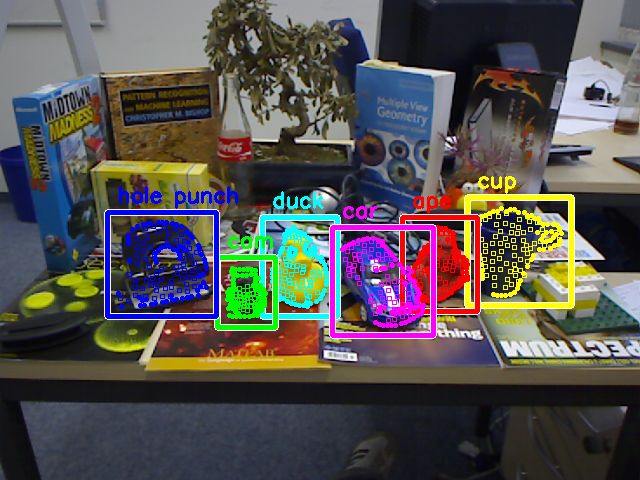

Efficient Template Matching for Object Detection
-
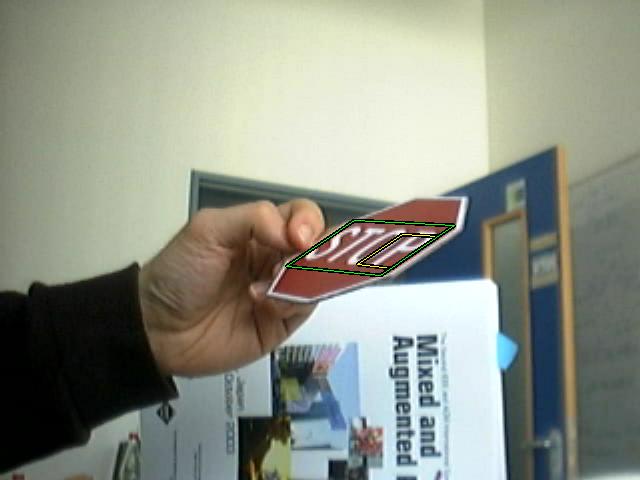
ICCV'11 paper (oral) on efficient template matching for detecting objects.
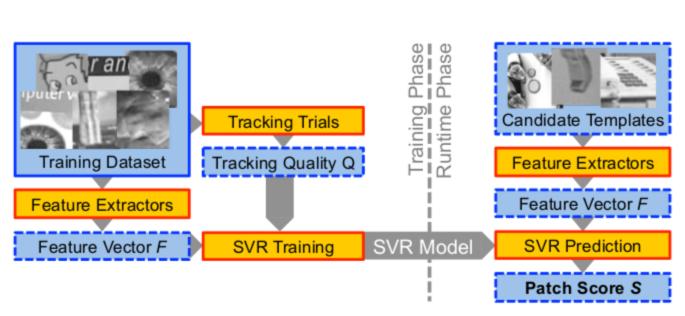
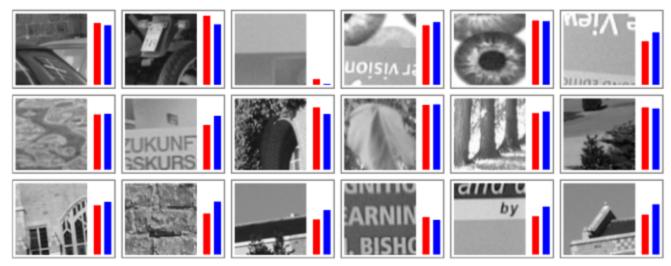
Rapid Selection of Reliable Templates
-
CVPR'10 paper on rapid selection of reliable templates for visual tracking.

Fast Binary Template Matching for Object Detection
-
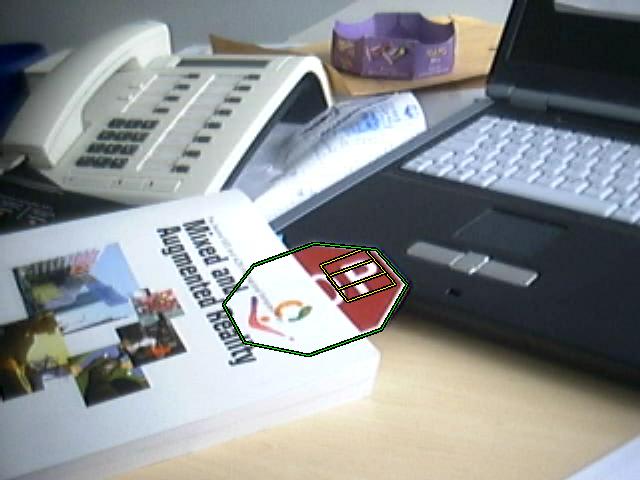
CVPR'10 paper on binary template matching for detecting objects.
Real-Time Learning of Accurate Patch Rectification
-
CVPR'09 paper (oral) on real-time learning of accurate patch rectification.


Distance Transform Templates
-
CVPR'09 paper on distance transform templates for object detection and pose estimation.
Simultaneous Recognition and Homography Extraction of Local Patches
-
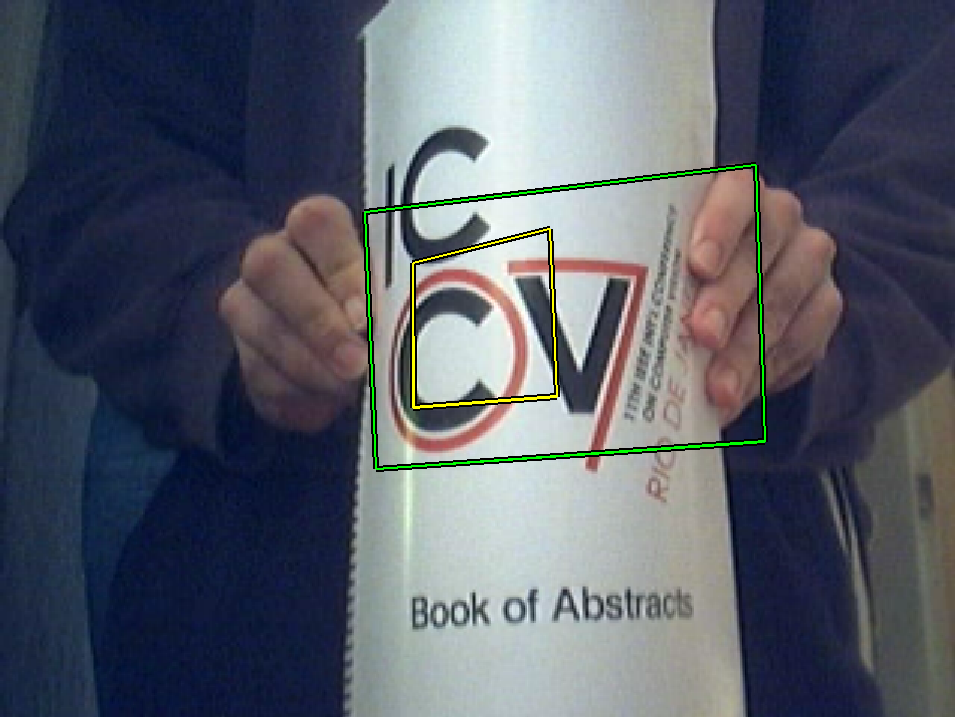
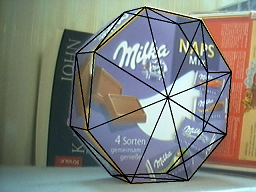
BMVC'08 paper on simultaneous recognition and homography extraction of local patches with a simple linear classifier.
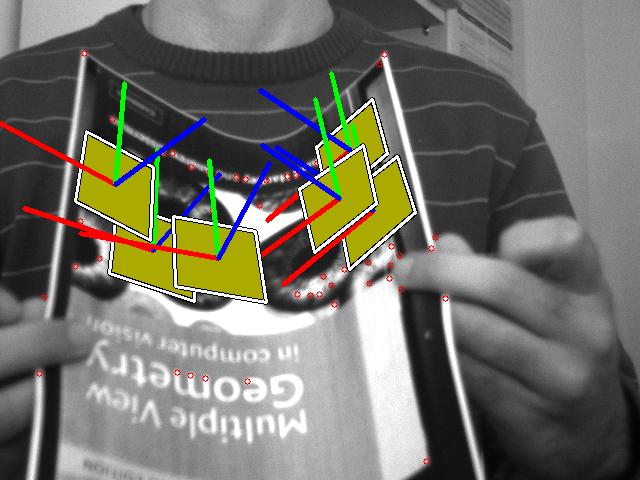
Online Learning of Patch Perspective Rectification
-
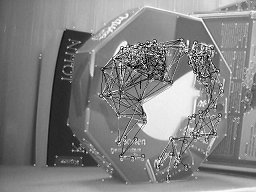
CVPR'08 paper on online learning of patch perspective rectification.
Natural 3D Markers
-
ICCV'07 paper on N3M: natural 3D markers for real-time object detection and pose estimation.

Industrial Discrepancy Check
-
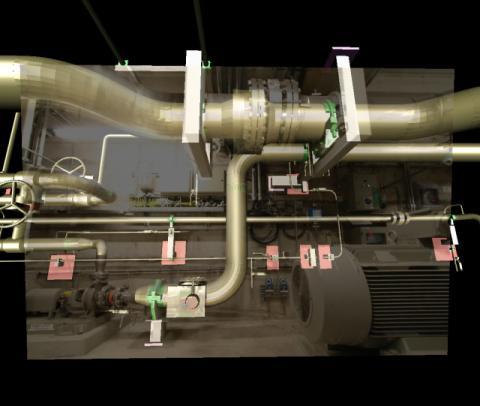
ISMAR'07 paper on industrial augmented reality solution for discrepancy check.
Work Experience
- Feb 2014 - now: working at Google (Google and X) on robotic perception
- Oct 2012 - Jan 2014: Industrial Perception Inc. (IPI - spin-off from WillowGarage): one of the first employees - acquired by Google
- Apr 2012 - Oct 2012: PostDoc at CAMP, TU Munich
- Jun 2010 - Jul 2010: internship at WillowGarage
- Aug 2007 - Mar 2012: PhD at CAMP, TU Munich (Prof. Nassir Navab) under the supervision of Prof. Vincent Lepetit, Dr. Selim Benhimane and Dr. Slobodan Ilic (passed with highest distinction - "summa cum laude")
- Mai 2007 - Jul 2007: 3 months research stay at EPFL at the lab of Prof. Pascal Fua
- Oct 2001 - Apr 2007: studied Informatik at TU Munich - finished with Diploma (equivalent to Master; main focus: Computer Vision; passed with high distinction - grade 1.2)
Skills
Theoretical Knowledge paired with Extensive Practical Experience- Computer Vision: Object Detection, Pose Estimation, Pose Refinement, Tracking, Reconstruction, Feature Extraction, Description and Matching, Marker Detection, Outlier Rejection, Multiple View Geometry etc.
- Machine Learning: Deep Learning (e.g. Object Detection, Classification, GANs, Decoder / Encoder, Transfer Learning etc.), Decision Trees and Random Forests / Trees / Ferns
- Rasterization: efficient software rasterization
- Optimization: Mathematical / Hardware / Software
- I'm fluent in C++ (C++11, std, boost, tbb, Eigen, OpenCV, etc.) and thanks to ML I'm getting quite fluent in Python these days
- I know my tensorflow
- Experienced in SSE / AVX optimization
- Experienced in OpenGL and CUDA
- Experienced in GIT and other company based build systems
- Minor experiences in several other languages (Java, Matlab, Octave, Pascal).